
Laboratorios Especializados del CITEDI IPN
Espacios para profesores y estudiantes, laboratorios especializados, equipamiento.
El programa cuenta con instalaciones y equipamiento de primer nivel para el desarrollo de la docencia y las tesis.
Infraestructura para investigación
El programa cuenta con 8 laboratorios:
- Sistemas de control robusto
- Sistemas de control
- Ciencia de datos
- Sistemas Inteligentes
- Procesamiento de imágenes
- Análisis multimedia y aprendizaje profundo
- Telecomunicaciones
- Percepción remota
El programa cuenta con infraestructura tecnológica única en la región y escasamente disponible en el país para el desarrollo de investigación de alto nivel en las áreas de formación, destacan:
- Vehículos autónomos y robots móviles terrestres
- Drones del tipo cuadrotor instrumentados con servovisión
- Servidores de ciencia de datos tipo AWS y clústeres de GPU propios
- Sistemas de captura de imágenes bi-dimensionales y tri-dimensionales
- Sistemas digitales para el encriptamiento en tiempo real de señales de telecomunicaciones
- Robots sub-actuados y brazos robóticos manipuladores
Parte de la infraestructura de investigación son desarrollos propios:
- Plataforma de vuelo para implementación de algoritmos de control para vehículo cuadrotor, actualmente en proceso de patentamiento.
- Péndulo invertido con rueda inercial.
- Péndulo de Furuta.
- Robot manipulador de cinco grados de libertad Pentaxis.

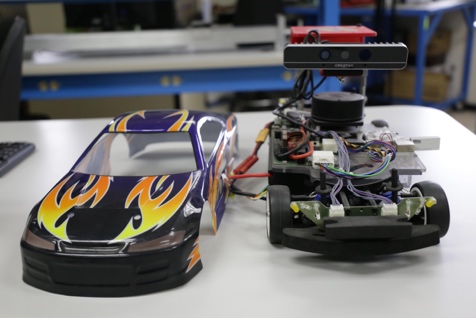

Fig. 1. Vehículos autónomos de primera y cuarta generación, y robots móviles terrestres

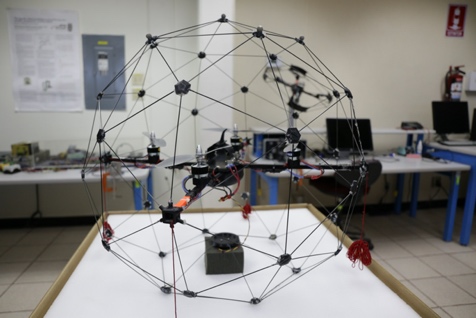

Fig. 2. Drones del tipo cuadrotor instrumentados con servovisión


Fig. 3. Servidores de ciencia de datos tipo AWS y sala del laboratorio con las terminales.

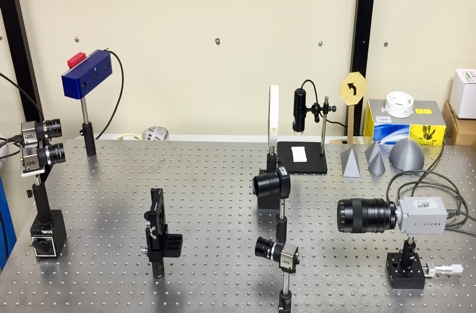
Fig. 4. Sistemas de captura de imágenes bi-dimensionales y tri-dimensionales

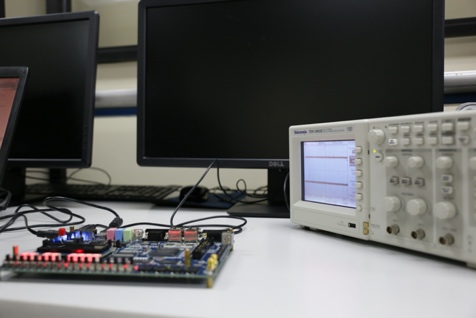
Fig. 5. Sistemas digitales para el encriptamiento en tiempo real de señales de telecomunicaciones





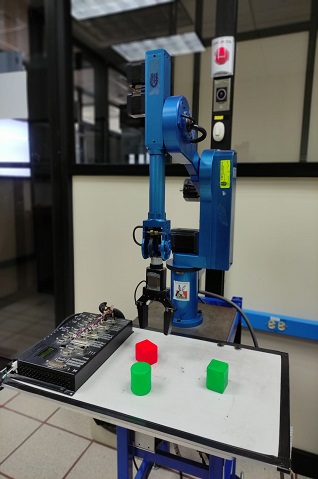
Fig. 6. Sistemas sub-actuados y brazo robótico manipulador
Parte de la infraestructura de investigación son desarrollos propios:
- Plataforma de vuelo para implementación de algoritmos de control para vehículo cuadrotor, actualmente en proceso de patentamiento.
- Péndulo invertido con rueda inercial.
- Péndulo de Furuta.
- Robot manipulador de cinco grados de libertad Pentaxis.

